
Scentralizowana czy zdecentralizowana architektura ruchu?
Centralizacja i decentralizacja napędów to bardzo interesujące zagadnienie, które stało się klasycznym tematem badawczym w ramach mechatroniki. Jest też problemem w kontekście nieustającego, a być może w ogóle nierozstrzygniętego, sporu o przewadze jednego rozwiązania nad drugim.
W wielu branżach dochodzi do zderzenia dwóch przeciwstawnych tendencji: z jednej strony chodzi o zachowanie sterowania centralnego, gdyż zapewnia ono unifikację rozwiązania technicznego, a tym samym wyrównuje różnice w zależnych od siebie procesach technologicznych, z drugiej zaś strony uważa się, że pożądane byłoby stopniowe powiększanie zakresu decentralizacji napędów ze względu na niższe koszty. Rozwój techniki i technologii umożliwia również zastosować mieszaną architekturę w której oba typy sterowania mogą współistnieć.
Z tego artykułu dowiesz się:
- Jaka jest różnica pomiędzy scentralizowaną a zdecentralizowaną architekturą napędów?
- Kiedy warto zastosować mieszaną architekturę sterowania?
- Na czym polega hybrydowa technologia napędów rozproszonych?
Większa elastyczność, większa wydajność, mniejsze koszty - tego właśnie oczekują użytkownicy nowoczesnych maszyn. Inżynierowie podejmują to wyzwanie korzystając ze zdobyczy nowoczesnej mechatroniki. W pierwszym kroku robią wszystko, aby zmniejszyć złożoność maszyny poprzez redukcję ruchomych części, następnie analizują najdroższe elementy maszyny pod względem zastąpienia ich innym rozwiązaniem a na koniec przeprowadzają bilans energetyczny tej zmodernizowanej konstrukcji. Oczywiście jest to bardzo uproszczony schemat działania a cały proces jest skomplikowany i podzielony na oddzielne zagadnienia techniczne. Jednym z nich są układy sterowania, szczególnie sterowania ruchem. Określając parametry napędu, inżynier staje przed wyborem architektury jego strowania - scentralizowana czy zdecentralizowana a może hybrydowa?
Przyjęcie scentralizowanej architektury, oznacza, że napęd wraz z wszystkimi innymi niezbędnymi elementami sterowania ruchem jest umieszczony w szafie. Z kolei w podejściu zdecentralizowanym (lub rozproszonym) napęd jest przenoszony z szafy sterowniczej do znacznie bliższego otoczenia procesu sterowania ruchem - często jest zintegrowany z samym silnikiem, tak jak np. napęd EURA EM-30. Systemy o mieszanej architekturze (hybrydowe) łączą ze sobą rozwiązanie scentralizowanego układu sterowania i komunikacji z rozproszoną konwersją mocy. Każda architektura sterowania ma swoje zalety i wady. Decyzja, która z nich jest najlepsza, zależy w dużej mierze od konkretnego zastosowania.

Wielkość (szafy sterowniczej) ma znaczenie.
Czynnikiem ograniczającym w coraz większej liczbie zastosowań przemysłowych jest przestrzeń. W przypadku zastosowania architektury scentralizowanej wszystkie napędy umieszczone są w jednej szafie, co upraszcza diagnostykę i konserwację. W tej architekturze scentralizowana jest dystrybucja energii elektrycznej, bezpieczeństwo, chłodzenie a także diagnostyka wizualna. W ujęciu całościowym centralizacja ma niewątpliwie swoją cenę, tj. zwiększa się powierzchnia szafy sterowniczej. W przemyśle jest to szczególnie odczuwalne w momencie rozbudowy parku maszynowego lub modernizacji istniejących maszyn. Obudowa systemów napędowych w szafie zapewnia oczywiście pełną ochronę przed środowiskiem zewnętrznym jednak straty ciepła generowane centralnie wymagają efektywnego chłodzenia. W przypadku zastosowania rozproszonej architektury sterowania napędu powierzchnia jaką zajmuje szafa sterownicza jest zazwyczaj mniejsza nawet o 80%, a koszty instalacji niższe nawet o 60%! Kolejną zaletą jest okablowanie zdecentralizowanych napędów ktrótszymi zestawami przewodów, co zmniejsza możliwość popełnienia błędu i skraca czas uruchomienia. Ponadto, zredukowana długość okablowania korzystnie wpływają na zachowanie EMC (kompatybilność elektromagnetyczną). Dodatkowo znacząco redukuje się koszt scentralizowanego systemu chłodzenia. Choć niektórzy zakładają, że ten typ architektury jest niewystarczająco wytrzymały, by zapewnić wysoki stopień zabezpieczenia przed otoczeniem, w istocie jest wręcz odwrotnie. Wiele z najnowszych zdecentralizowanych napędów takich jak EURA EP-66 i EURA EM-30 oferuje wbudowane funkcje i wysoki poziom ochrony IP66/NEMA 4X, co pozwala na instalację bezpośrednio na silniku lub w jego pobliżu. Solidna konstrukcja zdecentralizowanych napędów może chronić przed penetracją przez pył lub strumienie wody oraz zabezpieczać techników i innych pracowników przed kontaktem z elementami pod napięciem. Natomiast w architekturze hybrydowej można zastosować sterowanie scentralizowane dla napędów głównych a rozproszone dla napędów pomocniczych. W takim rozwiązaniu największą zaletą jest uproszczona diagnostyka i konserwacja tych pierwszych a szybki montaż i wymiana w razie awarii tych drugich.
Czy moc ogranicza?
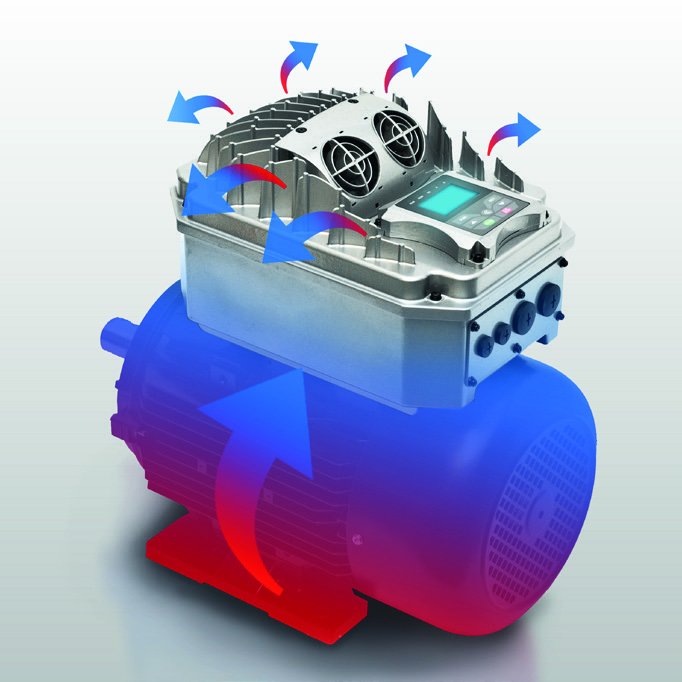
Zgodnie z dobrą praktyką inżynierską, wszelkie niekorzystne warunki pracy wymagają obniżenia osiągów silnika. Do takich warunków można zaliczyć m.in. temperaturę otoczenia powyżej 40oC, pozycję montażową silnika, wibracje czy rygor jego pracy (ciągły lub przerywany) a także częstotliwość przełączania napędu lub przewymiarowanie napędu do silnika. Bez względu na przyjętą architekturę sterowania, określenie warunków pracy jest procesem projektowym, który może w znacznym stopniu przyczynić się do zwiększenia niezawodności maszyn. Prawdą jest, że inżynierowie stosujący architekturę scentralizowaną nie muszą analizować, czy elektronika jest narażona na te same warunki otoczenia, co silnik. To jest konieczne w architekturze decentralnej, szczególnie, gdy napęd zabudowany jest bezpośrednio na silniku. W silnikach z wbudowanym napędem należy zaakceptować obniżenie wartości znamionowej silnika ze względu na wymianę ciepła z napędem. Aby zpobiec temu problemowi, przy tych samych parametrach T-n (zależność między prędkością obrotową a momentem obrotowym), silnik ze zintegrowanym napędem będzie miał wiekszą objętość konstrukcyjną. W praktyce stosuje się silniki większe niż to jest konieczne, aby zapewnić wymaganą wydajność w dopuszczalnych granicach temperatur dla elektroniki. To często powodowało, że inżynierowie rezygnowali z architektury decentralnej na korzyść architektury scentralizowanej. Co więcej, według wielu praktyków, decentralizacja ma największy sens w niskich zakresach mocy, zwykle poniżej 5 kW. Gdy moc znamionowa przekracza ten próg, napędy stają się zbyt duże, aby można je było umieścić na silniku w wielu zastosowaniach. Moc ogranicza również wybór silników dostępnych dla zdecentralizowanego podejścia w inny sposób - większe silniki wytwarzają znacznie więcej ciepła podczas dynamicznej pracy (przyspieszania i hamowania). EURA Drives w napędach EM-30 dysponuje technologią, która jest w stanie poradzić sobie z tym ciepłem między napędem a silnikiem, ale jest ona przeznaczona do mniejszych osi - maksymalnie 11kW. Dla większych mocy, inżynierowie EURA Drives prowadzą badania w celu opracowania odpowiedniej technologii rozpraszania ciepła.
Gdy moc stanowi w analizie największą przeszkodą w przejściu z scentralizowanej architektury na decentralną z pomocą inżynierowi przychodzi coraz częściej stosowane rozwiązanie hybrydowe. Pierwsze, najprostsze rozwiązanie hybrydowe polega na zdecentralizowaniu napędów pomocniczych, które najczęściej nie przekraczają mocy 7,5kW, i pozostawieniu w architekturze scentralizowanej napędów głównych. Drugim rozwiązaniem hybrydowym jest zastosowanie zdecentralizowanych napędów montowanych w pobliżu silników, np. na korpusie maszyny i pozostawienie scentralizowanej architektury dla systemu sterującego. W tym rozwiązaniu oszczędności nie tylko wynikają z zastosowania mniejszych szaf sterujących i ich chłodzenia, ale również mniej skomplikowanego okablowania napędów. W takim rozwiązaniu hybrydowym sprawdzają się napędy EURA EP-66, które dostępne są do mocy 90kW i dodatkowo umożliwiają wykorzystanie przestrzeni udostępnionej w obudowie napędu na montaż dodatkowych elementów sterowania.
Modularność.
Można stwierdzić, że w dzisiejszych czasach maszyny i przemysł coraz częściej funkcjonują w oparciu o modularność, głównie dlatego, że systemy modułowe wpływaja na obniżenie kosztów produkcji lub inwestycji oraz wpływają na skrócenie czasu dostawy lub zakończenia inwestycji. Systemy scentralizowane są postrzegane jako mniej modułowe niż ich rozproszone odpowiedniki. Generalnie modularność centrali nie jest związana z modularnością całego systemu. Natomiast system zdecentralizowany jest niezwykle modułowy, a architektura napędów może być zgodna z mechaniczną modułowością maszyny lub systemu, co przynosi oczywiste korzyści. Zdecentralizowane napędy można umieścić tam, gdzie są potrzebne, a dzięki zintegrowanym modułom I/O mogą rozwiązywać zadania bez potrzeby dodatkowych terminali sterujących, co oszczędza czas i pieniądze. Napędy EURA Drives oferują sieci komunikacyjne i moduły wejścia/wyjścia, które są szybkie i łatwe w konfiguracji, co pozwala na dostosowanie standardowego napędu do indywidualnych zastosowań użytkownika. W dzisiejszej technice napędowej zyskuje popularność komunikacja typu "plug-and-drive" poprzez sieci Ethernet czasu rzeczywistego. Zastosowanie interfejsów plug-in dla protokołów takich jak Profinet i EtherCAT umożliwia bezproblemową integrację napędów z sieciami komunikacyjnymi u użytkownika końcowego. Dla inżynierów, którzy rozważają podejście rozproszone, użycie zdecentralizowanego modułu PLC wraz ze zdecentralizowanymi napędami zmniejsza obciążenie sterownika wyższego poziomu i może nawet, w niektórych zastosowaniach, stworzyć podstawę dla maszyn modułowych, gdzie już nie występują szafy sterownicze. Takie moduły PLC będą zazwyczaj wyposażone w RTOS (Real-Time Operating Software), aby zapewnić zdecentralizowaną inteligencję z możliwościami sieciowymi zapewnionymi przez wybór protokołów komunikacyjnych. W rezultacie zapewniona jest elastyczność konstrukcyjna i możliwość modułowej budowy maszyn.
Dwa pytania, nie jedno.
Odpowiedź na pytanie, czy stosować architekturę decentralną, nie jest proste, zwłaszcza w zaawansowanych aplikacjach sterowania ruchem. Powodem jest to, że aplikacje te często wymagają wysokiego stopnia synchronizacji, co oznacza, że oprócz konwersji mocy ważnym aspektem jest również sterowanie. W związku z tym, pytanie o wybór architektury, składa się w rzeczywistości z dwóch pytań - jednego dotyczącego konwersji mocy, a drugiego dotyczącego sterowania i komunikacji. W obu przypadku inżynierowie muszą rozważyć zarówno zalety, jak i ograniczenia wybranej architektury. Jeśli chodzi o napędy, mniejsza szafka na elektronikę oraz oszczędności na kosztach chłodzenia i okablowania są z pewnością silnymi czynnikami motywującymi do zastosowania architektury zdecentralizowanej. Jeśli chodzi o sterowanie to nadal wielu inżynierów woli skoncentrować je w jednej szafie, zamiast rozdzielać na kilka mniejszych jednostek dla każdego napędu. Inne czynniki, które mogą wpłynąć na wybór architektury, to liczba napędzanych osi oraz dostępna przepustowość do wysyłania i odbierania sygnałów przez maszynę. Inżynier musi zdawać sobie sprawę, że występują opóźnienia w przesyłaniu sygnałów z urządzenia do urządzenia, niezależnie czy wykorzystuje się coraz szybsze protokołu sieciowe czy moduły komunikacyjne. Ogólnie rzecz biorąc, im więcej osi koordynujesz, tym bardziej ma sens dążenie do centralnego sterowania, w takim przypadku przetwarzanie sygnału bezośrednio na wysokowydajnym procesorze jest zwykle najszybszym sposobem przetwarzania sygnałów w celu skoordynowania ruchu. Poświęcenie czasu na dokładną analizę i wybór architektury zarówno dla konwersji mocy jak i sterowania może przynieśc duże korzyści.
Architektura hybrydowa - miara modułowości.
Wielkim wyzwaniem dla dzisiejszych konstruktorów maszyn jest to, że ich klienci zazwyczaj chcą czegoś nieco innego, co oznacza, że muszą projektować swoje maszyny tak, aby charakteryzowały się wysoką modularnością.
"Wielu inżynierów, konstruktorów maszyn przekonuje się, że połączenie scentralizowanego sterowania z rozproszonymi napędami może pomóc w uzyskaniu modułowości w ich maszynach.
W takich realiach całkowicie scentralizowane podejście często nie jest opłacalne, ponieważ konstruktor może być zmuszony do zainwestowania zasobów inżynieryjnych w zmianę zawartości szafy sterującej za każdym razem, gdy usuwa się lub dodaje funkcje spełniające oczekiwania klienta. Zmiany te mogą również dotyczyć okablowania pomiędzy centralną szafą sterującą do różnych sekcji maszyny. Konstruktorom maszyn bardzo trudno jest konkurować pod względem kosztów a jednocześnie przeprowadzać wiele prac inżynierskich na każdej maszynie, która wychodzi na rynek. Dlatego też, aby umożliwić dostosowanie przy minimalnym nakładzie prac inżynieryjnych, wielu konstruktorów maszyn oferuje niestandardowe funkcje w postaci gotowych modułów, które można podłączyć do jednostki bazowej zawierającej podstawowe komponenty maszyny. Ponieważ podstawowe oprogramowanie i sprzęt będą takie same w maszynie niezależnie od wybranych opcji, cały sprzęt, który nie jest częścią podstawowej konstrukcji maszyny, można zdecentralizować w opcjonalnym module maszyny.
Przemienniki częstotliwości EURA Drives to napędy znane i szeroko stosowane na rynku polskim. Dostępne są w zakresie mocy od 0,25kW do 400kW. Oficjalnym dystrybutorem na terenie Polski jest przedsiębiorstwo HF Inverter Polska z siedzibą w Toruniu. Przemienniki częstotliwości EURA Drives dla architektury zdecentralizowanej jak i hybrydowej dostępne są z magazynu w Toruniu. W HF Inverter Polska pracują wysokiej klasy specjaliści. Większość z nich to inżynierowie automatycy, posiadający niezbędną wiedzę i doświadczenie z mechatroniki i energoelektroniki, którzy tworzą dział doradców techniczno-handlowych. Dużym wsparciem dla działu doradców jest rozbudowany dział techniczno-serwisowy.